概述
目前在选矿企业物料传送转运过程中,普遍通过人工对布料小车进行操作,通过人工决定小车的前进、后退、停止和下料量。布料小车的不间断行走导致现场操作工人的工作强度非常大,工人行走操作不慎掉入料仓发生伤亡事故的情况时有发生,长期大量粉尘与噪音污染严重危害人员身心健康,现场职业病危害极其严重。
南京鼎尔特科技有限公司集互联网技术、自动化控制技术、激光检测技术、RFID和无线数据图传等技术研发出全自动智能布料机器人,其能沿着轨道全自智能运行,将上游物料根据需要均匀卸放在指定的料棚或仓位中。布料机器人可完全替代人工现场操作,有效规避相关生产环节的人员伤亡事故的发生;极大地减少了现场职业危害的覆盖面;增强了人员及设备的安全性、上下游运行均衡性、及时性;降低了企业运营成本、减轻了员工劳动强度,提高产能。
智能布料机器人主要用于矿山、非煤矿山、港口中涉及堆场存放、矿石分检、装载输送等环节中。
产品功能
1)能实现“机械化换人,自动化减人“的安全生产本质管理要求。
2)能够实现物料传送和转运环节现场运行的无人化智能运行。
3)能100%将职工从环境恶劣的作业现场解放出来,有效控制现场职业病危害的影响范围。
4)能实现均匀布料、提高物料生产产能30%。
5)能减少漫料、空仓等事故造成至少50% 以上的事故处理、设备维护费用。

图1,改造前人工机旁随行操作现场
系统组成
1)位置感知系统
智能布料机器人的位置感知系统由移动设备装置、智能化驱动装置、精密探测装置等组成。能够实时把智能化驱动装置和精密探测装置的信号传输给机器人主控系统,实现智能布料机器人准确识别下料仓,位置精度达到1mm,做到准确、实时、安全下料。
2)料仓料位识别系统
每个料仓安装自动料位检测装置,可旋转清灰。装置采用耐腐蚀材料,解决矿山环境高粉尘,矿石多含硫腐蚀等问题,有效的保证料位检测和料仓漫料保护,彻底防止漫料事故。
3)车载控制系统
智能布料机器人车载控制系统移动端中央控制主控单元,可与地面控制系统进行信息交互。其包含车载控制数据处理系统、车载红外摄像图像传输系统等。
4)地面控制系统
智能布料机器人地面控制系统是固定端中央控制主控单元,具备数据采集汇总、智能分析运算和信令传输分配等系统管理功能等。
5)车地互联系统
采用军工级双向无线传输系统,抗强磁干扰。实现车载控制系统和地面控制系统的数据、图像的无损传输。通过车地互联系统把遥信、遥测、遥控、遥调数据与地面控制系统无缝连接,形成统一、高效的数据链接。
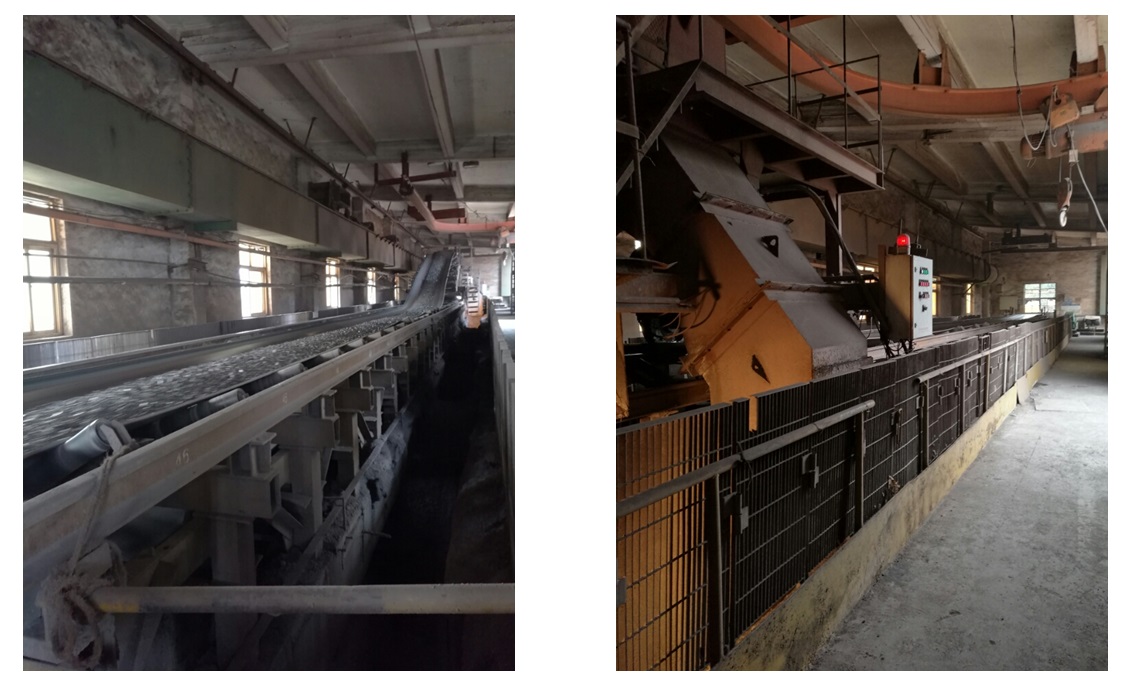
图2-改造后无人值守现场一 图3-改造后无人值守现场二
6)人机交互系统
智能机器人的人机交互系统,采用开放式多任务的操作系统,操控性十分友好、人性化。人机交互内容包括控制方式选择、参数设置、实时与历史数据趋势显示、报表打印等功能。
如图4,集控中心人机交互界面
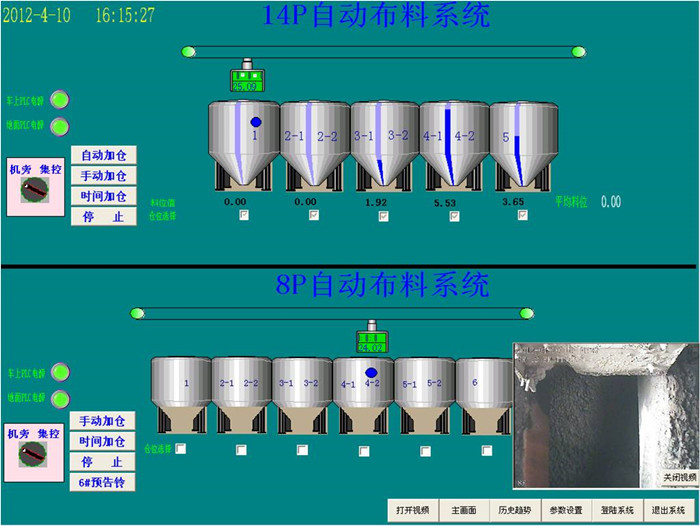
如图5,集控中心现场

技术指标和特点
1)一键启停,全自动智能行走及配料。
2)行走位置检测精度达到1mm。
3)实时连续料位检测,对料仓漫料自动保护,杜绝漫料事故。
4)具有实时布料图像传送功能。
5)维护简便,料位装置便捷清灰定位翻转维护功能。
6)机器人与地面双向互连数据图像无线传输。
7)可以实现在远程对机器人集中监视或人工干预遥控机器人。
8)与信息化系统的开放通迅连接。
资质与荣誉
中国冶金矿山企业协会科学技术奖